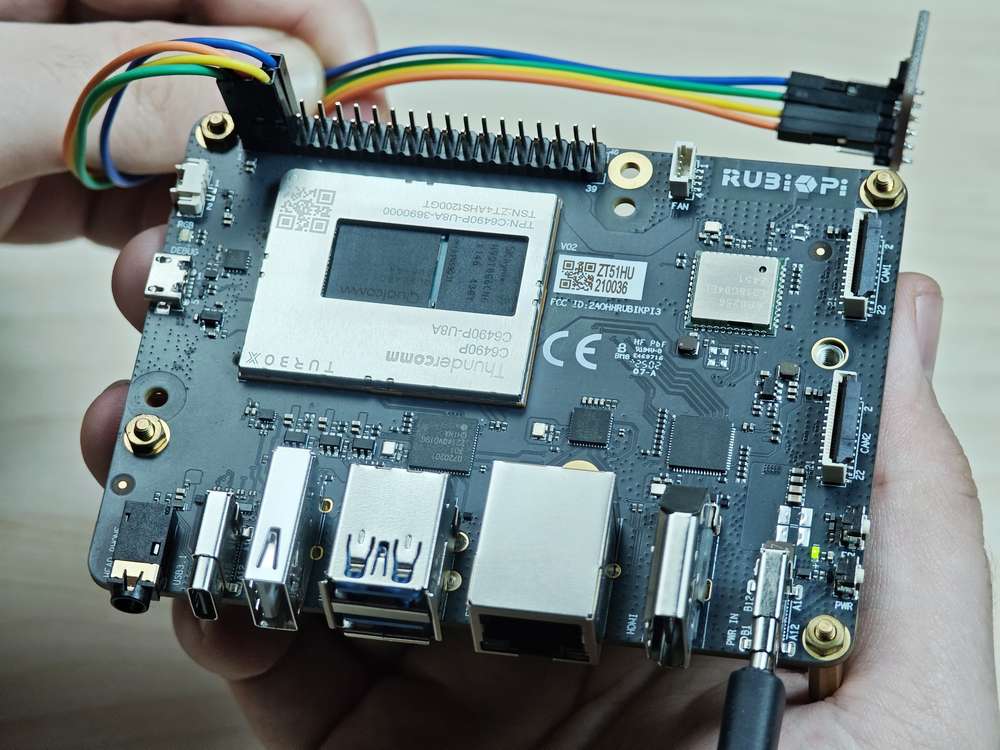
40 pin 连接器
GPIO
魔方派 3 适配了 WiringRP(基于高性能 GPIO 编程库 WiringPi),推荐使用 WiringRP 来控制 GPIO,和对 GPIO 编程。关于 WiringRP 详细信息可访问 https://github.com/rubikpi-ai/WiringRP 查看。
引脚分布
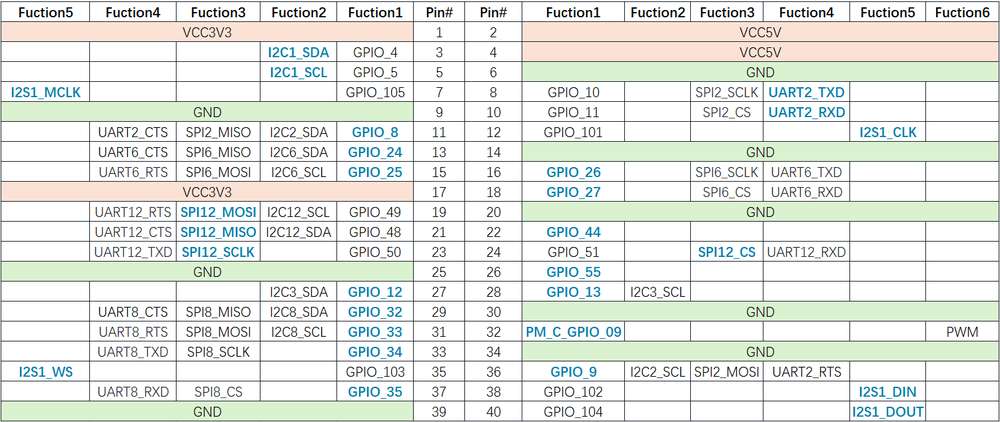
下图是魔方派 3 40-pin 连接器的引脚默认功能,其中大部分引脚和开源开发板 40-pin 连接器引脚的默认功能兼容。

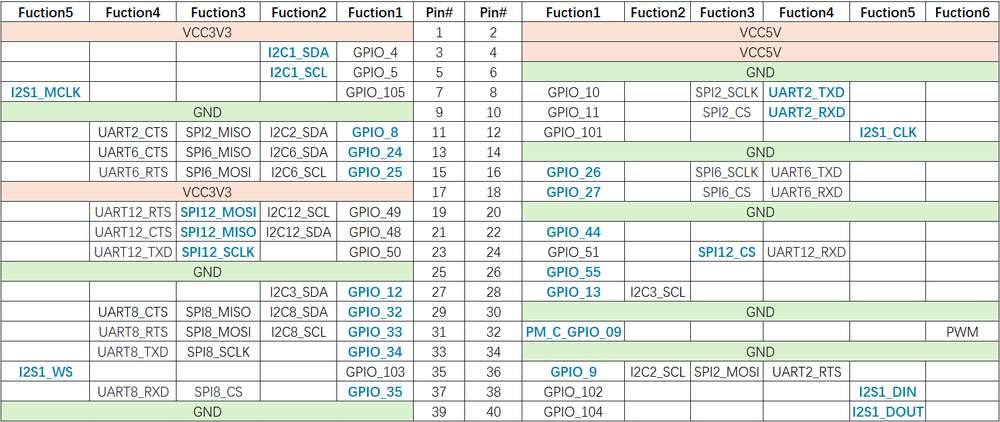
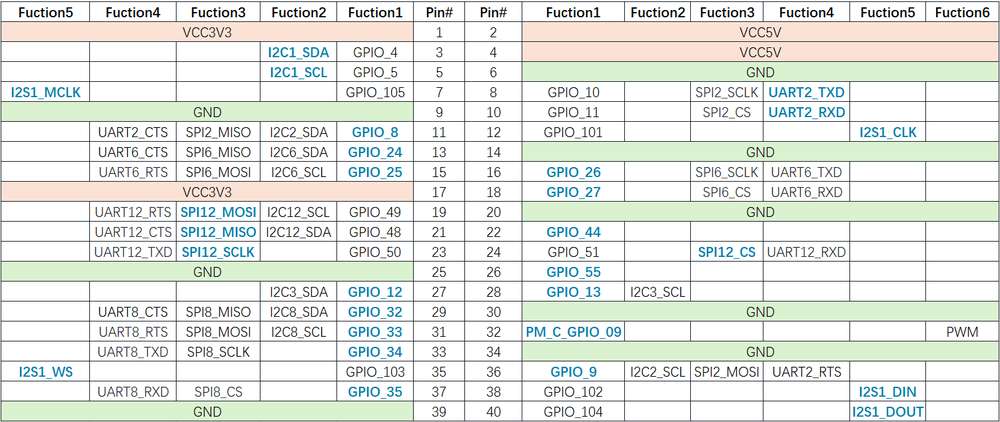
下表是 40-pin连接器支持的所有功能,图中蓝色字体表明默认功能。
使用 GPIO
在魔方派 3 中可以使用 shell 命令,或使用编程语言来控制 GPIO。
- Shell 命令
- WiringRP
- C
- Python
在魔方派 3 中执行下面的步骤控制 GPIO。
下面的命令需要 root 权限。
- 使用
sudo su命令切换到 root 权限用户。
-
使用 WiringRP 相关命令
使用前需按下面方法安装 WiringRP:
- 将魔方派公共个人软件档案(PPA)添加到您的魔方派 3 Ubuntu 软件源。
REPO_ENTRY="deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main"
if ! grep -q "^[^#]*$REPO_ENTRY" /etc/apt/sources.list; then
sudo sed -i '$a deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main' /etc/apt/sources.list
fi
sudo apt update- 执行下面命令安装 WiringRP.
sudo apt install wiringrp安装完成后可以使用下面命令操作 GPIO:
- 查看 GPIO 状态
gpio readall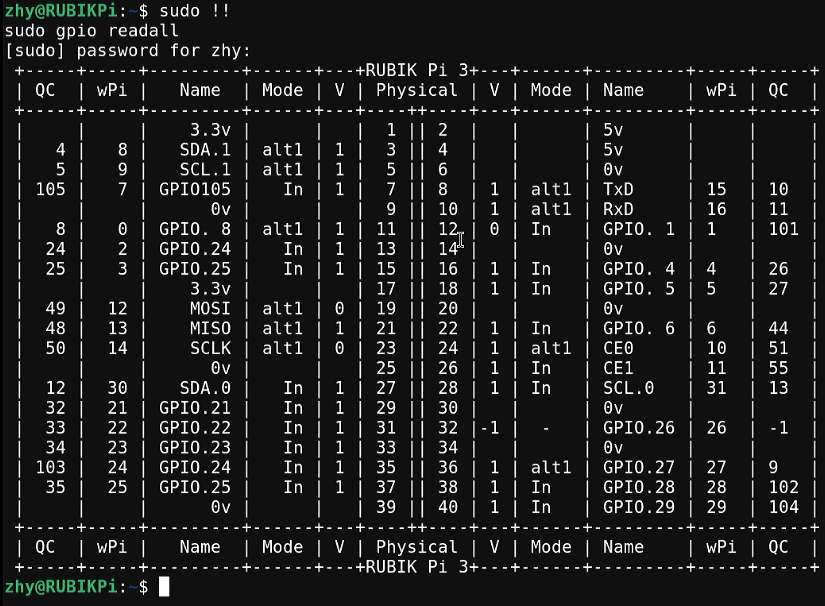
- 设置 GPIO 模式
gpio mode 15 in # 将15号引脚模式置为输入
gpio pins # 查看更改之后的状态
gpio mode 15 out # 将15号引脚模式置为输出
gpio pins # 查看更改之后的状态- 设置引脚电平
gpio write 15 1 # 将15号引脚置为高电平
gpio read 15 # 读取更改后引脚状态
gpio write 15 0 # 将15号引脚置为低电平
gpio read 15 # 读取更改后引脚状态 -
操作 /sys/class/gpio 下相关节点 GPIO 子系统的编号如下表。

- 进入 /sys/class/gpio 目录:
cd /sys/class/gpio- 将要控制的 GPIO 导出,如控制 13 号引脚 GPIO_24:
echo 571 > export- 进入到 gpio571 目录设置 GPIO 属性:
cd gpio571
ls
-
direction(方向):
- 输入:in
- 输出:out
-
value(值):
- 低电平:0
- 高电平:1
-
edge (中断边沿):
-
上升沿触发:rising
-
下降沿触发:falling
-
双边沿触发:both
-
禁用中断:none
-
- 如设置 13 号引脚输出高电平:
echo out > direction
echo 1 > value- 取消导出 13 号引脚到用户空间:
cd ..
echo 571 > unexport
WiringRP 库中提供了一系列的 API 函数,用更少的逻辑实现控制。
使用前需按下面方法安装 WiringRP:
- 将魔方派公共个人软件档案(PPA)添加到您的魔方派 3 Ubuntu 软件源。
REPO_ENTRY="deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main"
if ! grep -q "^[^#]*$REPO_ENTRY" /etc/apt/sources.list; then
sudo sed -i '$a deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main' /etc/apt/sources.list
fi
sudo apt update
- 执行下面命令安装 WiringRP.
sudo apt install wiringrp
以下代码示例,代码将 13 号引脚设置为输出, 15 号引脚设置为输入,循环检测 15 号引脚的电平状态:
#include <stdio.h>
#include <wiringPi.h>
int main (void)
{
wiringPiSetup () ;
pinMode (13, OUTPUT) ;
pinMode (15, INPUT) ;
for (;;)
{
digitalWrite (13, HIGH) ; // On
printf("%d\n", digitalRead (15)); // On
delay (1000) ; // mS
digitalWrite (13, LOW) ; // Off
printf("%d\n", digitalRead (15)); // On
delay (1900) ;
}
return 0 ;
}
在魔方派 3 中编译程序
gcc gpio.c -o gpio -lwiringPi
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
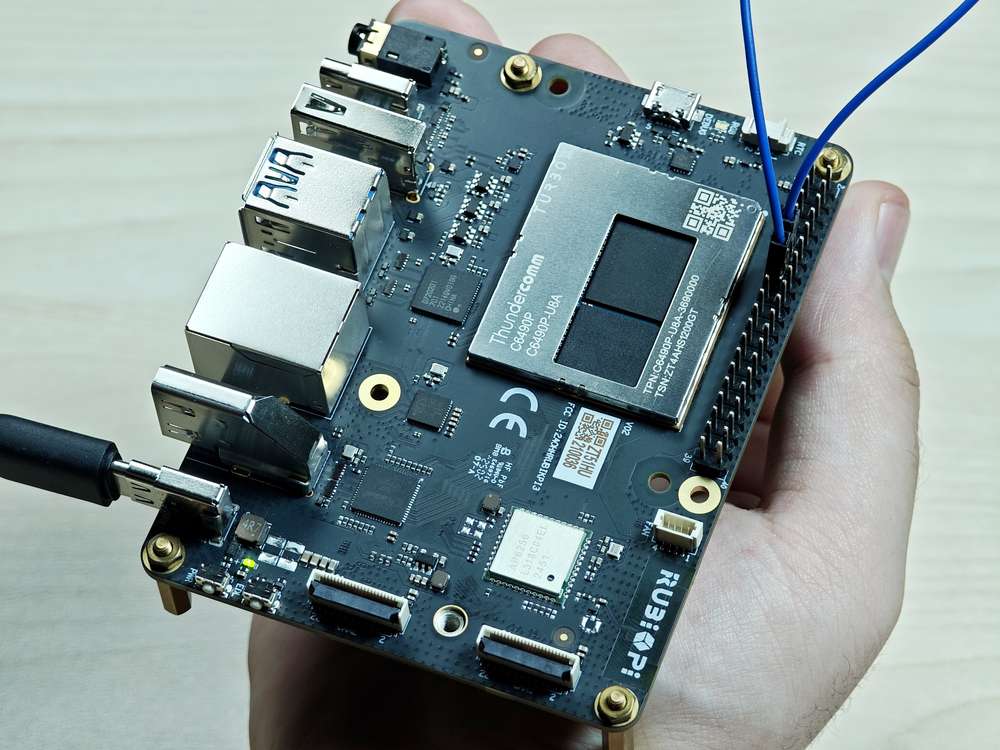
将 13 和 15 号引脚使用杜邦线短接,测试 GPIO 电平控制和电平读取情况,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
./gpio
程序运行结果如下:

以下代码示例,代码将 13 号引脚设置为输出, 15 号引脚设置为输入,循环检测 15 号引脚的电平状态:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int out_gpio = 571;
int in_gpio = 572;
int main() {
char export_path[50] = {};
char export_command[100] = {};
snprintf(export_path, sizeof(export_path), "/sys/class/gpio/export");
snprintf(export_command, sizeof(export_command), "echo %d > %s ", out_gpio, export_path);
system(export_command);
snprintf(export_command, sizeof(export_command), "echo %d > %s ", in_gpio, export_path);
system(export_command);
char direction_path[50] = {};
snprintf(direction_path, sizeof(direction_path), "/sys/class/gpio/gpio%d/direction", out_gpio);
FILE *direction_file = fopen(direction_path, "w");
if (direction_file == NULL) {
perror("Failed to open GPIO direction file");
return -1;
}
fprintf(direction_file, "out");
fclose(direction_file);
snprintf(direction_path, sizeof(direction_path), "/sys/class/gpio/gpio%d/direction", in_gpio);
direction_file = fopen(direction_path, "w");
if (direction_file == NULL) {
perror("Failed to open GPIO direction file");
return -1;
}
fprintf(direction_file, "in");
fclose(direction_file);
char value_in_path[50] = {};
char value_out_path[50] = {};
char cat_command[100] = {};
snprintf(value_out_path, sizeof(value_out_path), "/sys/class/gpio/gpio%d/value", out_gpio);
snprintf(value_in_path, sizeof(value_in_path), "/sys/class/gpio/gpio%d/value", in_gpio);
snprintf(cat_command, sizeof(cat_command), "cat %s", value_in_path);
FILE *value_out_file = fopen(value_out_path, "w");
if (value_out_file == NULL) {
perror("Failed to open GPIO value file");
return -1;
}
for (int i = 0; i < 5; i++) {
fprintf(value_out_file, "1");
fflush(value_out_file);
system(cat_command);
sleep(1);
fprintf(value_out_file, "0");
fflush(value_out_file);
system(cat_command);
sleep(1);
}
fclose(value_out_file);
char unexport_path[50] = {};
char unexport_command[100] = {};
snprintf(unexport_path, sizeof(unexport_path), "/sys/class/gpio/unexport");
snprintf(unexport_command, sizeof(unexport_command), "echo %d > %s ", out_gpio, unexport_path);
system(unexport_command);
snprintf(unexport_command, sizeof(unexport_command), "echo %d > %s ", in_gpio, unexport_path);
system(unexport_command);
return 0;
}
在魔方派 3 中编译程序:
gcc gpio.c -o gpio
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
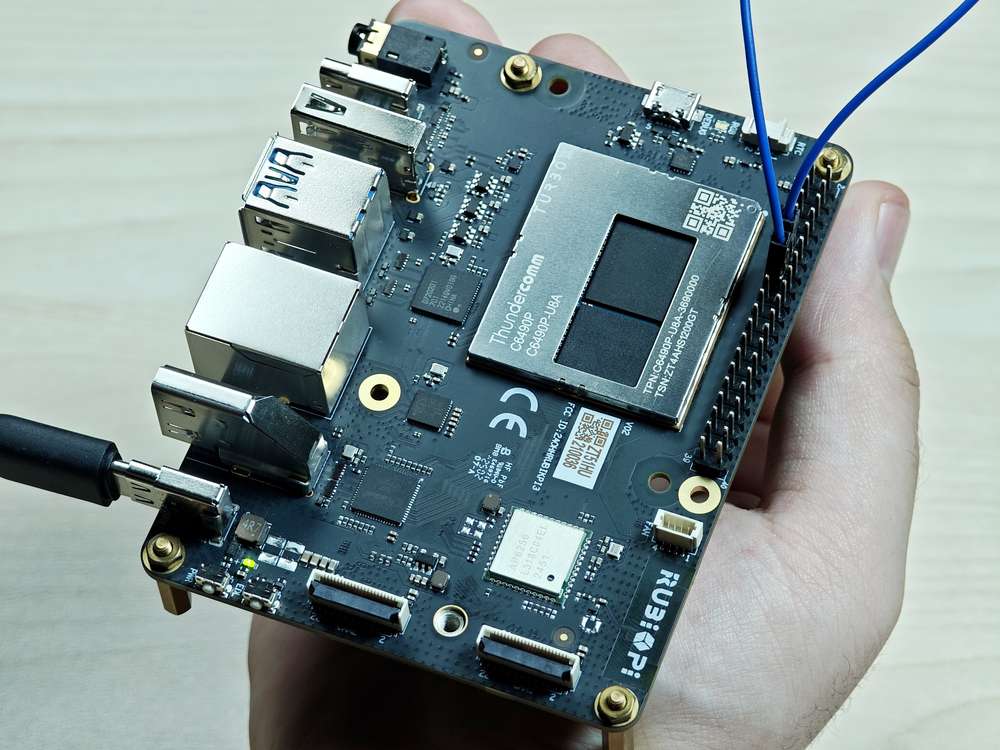
将 13 和 15 号引脚使用杜邦线短接,测试 GPIO 电平控制和电平读取情况,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
./gpio
程序运行结果如下:

可使用 Python 的 periphery 库控制 GPIO,可在魔方派 3 中使用下面命令进行安装:
apt install python3-pip
apt install python3-periphery
下方截取代码是使用 periphery 库操作 GPIO 的示例,其中将 13 号引脚设置为输出,15 号引脚设置为输入,循环检测 15 号引脚的电平状态。
from periphery import GPIO
import time
out_gpio = GPIO(571, "out")
in_gpio = GPIO(572, "in")
try:
while True:
try:
out_gpio.write(True)
pin_level = in_gpio.read()
print(f"in_gpio level: {pin_level}")
out_gpio.write(False)
pin_level = in_gpio.read()
print(f"in_gpio level: {pin_level}")
time.sleep(1)
except KeyboardInterrupt:
out_gpio.write(False)
break
except IOError:
print("Error")
finally:
out_gpio.close()
in_gpio.close()
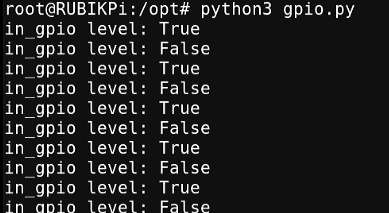
将 13 和 15 号引脚使用杜邦线短接测试 GPIO 电平控制和电平读取情况,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
python3 gpio.py
程序运行结果如下:
I2C
I2C 是飞利浦公司在 20 世纪 80 年代开发的一种双向 2 线制总线,用于实现高效的 IC 间控制总线。总线上的每个设备都有其唯一的地址(由飞利浦公司领导的 I2C 总机构注册)。I2C 核心支持多控制器模式,以及 10 位目标地址和 10 位可扩展地址。关于 I2C 的更多信息,请参阅 https://www.i2c-bus.org/fileadmin/ftp/i2c_bus_specification_1995.pdf
魔方派 3 适配了 WiringRP(基于高性能 GPIO 编程库 WiringPi ) ,推荐使用 WiringRP 来控制 I2C,和对 I2C 编程。关于 WiringRP 详细信息可访问 https://github.com/rubikpi-ai/WiringRP 查看。
引脚分布
下图是魔方派 3 40-pin 连接器的引脚默认功能,其中大部分引脚和开源开发板 40-pin 连接器引脚的默认功能兼容。
3 号引脚和 5 号引脚默认已设置配为 I2C1。
下表是 40-pin 连接器支持的所有功能,图中蓝色字体表明默认功能。
使用 I2C
在魔方派 3 中可以使用 shell 命令,或使用编程语言来控制 I2C 总线。
- Shell 命令
- WiringRP
- C
- Python
在魔方派 3 中执行下面步骤控制 I2C 总线。 使用 WiringRP 相关命令前使用下面方法安装:
- 将魔方派公共个人软件档案(PPA)添加到您的魔方派 3 Ubuntu 软件源。
REPO_ENTRY="deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main"
if ! grep -q "^[^#]*$REPO_ENTRY" /etc/apt/sources.list; then
sudo sed -i '$a deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main' /etc/apt/sources.list
fi
sudo apt update
- 执行下面命令安装 WiringRP库。
sudo apt install wiringrp
-
使用 WiringRP 相关命令:
./gpio -x ads1115:100:10 aread 100 #通过 I2C 总线读取 ADS1115 设备的模拟信号值 -
使用 i2cdetect 工具
-
查看 I2C1 接口上的设备:
i2cdetect -a -y -r 1 -
读取地址为 0x38 设备的全部寄存器:
i2cdump -f -y 1 0x38 -
向地址为 0x38 设备的 0x01 寄存器地址写入 0xaa:
i2cset -f -y 1 0x38 0x01 0xaa -
读取地址为 0x38 的设备,寄存器地址为0x01处的数值:
i2cget -f -y 1 0x38 0x01
-
若无 i2cdetect 等命令,可执行 apt install i2c-tools 命令进行安装。
WiringRP 库中提供了一系列的 API函数,用更少的逻辑实现控制。
使用前需按下面方法安装 WiringRP:
- 将魔方派公共个人软件档案(PPA)添加到您的魔方派 3 Ubuntu 软件源。
REPO_ENTRY="deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main"
if ! grep -q "^[^#]*$REPO_ENTRY" /etc/apt/sources.list; then
sudo sed -i '$a deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main' /etc/apt/sources.list
fi
sudo apt update
- 执行下面命令安装 WiringRP.
sudo apt install wiringrp
以下代码示例,I2C1总线和地址为0x38的设备进行通信,向设备0x01地址处写入0xaa:
#include <wiringPi.h>
#include <wiringPiI2C.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#define I2C_ADDRESS 0x38
int main(void)
{
int fd;
if (wiringPiSetup() == -1) {
exit(1);
}
fd = wiringPiI2CSetup(1, I2C_ADDRESS);
if (fd == -1) {
exit(1);
}
unsigned char data[2];
if (read(fd, data, 2) != 2) {
exit(1);
}
wiringPiI2CWriteReg8(fd, 0x01, 0xaa) ;
close(fd);
return 0;
}
魔方派 3 中编译程序:
gcc i2c.c -o i2c -lwiringPi
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
将 3 和 5 号引脚连接 I2C 传感器,验证 I2C 总线通信,如下图所示
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令运行程序:
./i2c
以下代码示例,I2C1 总线和地址为 0x38 的设备进行通信,向设备 0x01 地址处写入 0xaa:
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <fcntl.h>
#include <unistd.h>
#include <linux/i2c-dev.h>
#include <sys/ioctl.h>
#define I2C_DEVICE_PATH "/dev/i2c-1"
int main() {
uint8_t data[2] = {0x01,0xaa};
const char *i2c_device = I2C_DEVICE_PATH;
int i2c_file;
if ((i2c_file = open(i2c_device, O_RDWR)) < 0) {
perror("Failed to open I2C device");
return -1;
}
ioctl(i2c_file, I2C_TENBIT, 0);
ioctl(i2c_file, I2C_RETRIES, 5);
printf("i2cdetect addr : ");
for (int x = 0; x < 0x7f; x++)
{
if (ioctl(i2c_file, I2C_SLAVE, x) < 0) {
perror("Failed to set I2C slave address");
close(i2c_file);
return -1;
}
if (write(i2c_file, data, 2) == 2)
{
printf("0x%x,", x);
}
}
close(i2c_file);
printf("\r\n");
return 0;
}
在魔方派 3 中编译
gcc i2c.c -o i2c
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
将 3 和 5 号引脚连接 I2C 传感器,验证 I2C 总线通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
./i2c
程序运行结果如下:

可使用 Python 的 smbus 库控制 I2C,可在魔方派 3 中使用下面命令进行安装:
apt install python3-smbus
以下代码示例,使用 I2C1 总线和地址为 0x38 的设备进行通信,向设备 0x01 地址处写入 0xaa:
import smbus
def main():
data = [0x01, 0xaa]
try:
i2c_bus = smbus.SMBus(1)
print("i2cdetect addr : ", end="")
for address in range(0x7F):
try:
i2c_bus.write_i2c_block_data(address, 0, data)
print("0x{:02X},".format(address), end="")
except OSError:
pass
print()
except Exception as e:
print(f"An error occurred: {e}")
finally:
if i2c_bus:
i2c_bus.close()
if __name__ == "__main__":
main()
将 3 和 5 号引脚连接 I2C 传感器,验证 I2C 总线通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
python3 i2c.py
程序运行结果如下:

SPI
串行外设接口 (SPI) 是在全双工模式下工作的同步串行数据链路。SPI 又称为 4 线制串行总线。
魔方派 3 适配了 WiringRP(基于高性能 GPIO 编程库 WiringPi),推荐使用 WiringRP 来控制 SPI,和对 SPI 编程。关于 WiringRP 详细信息可访问 https://github.com/rubikpi-ai/WiringRP 查看。
引脚分布
下图是魔方派 3 40-pin 连接器的引脚默认功能,其中大部分引脚和开源开发板 40-pin 连接器引脚的默认功能兼容。
19 号、21 号、23 号、24 号引脚默认已设置配为 SPI。
下表是 40-pin 连接器支持的所有功能,图中蓝色字体表明默认功能。
使用 SPI
- WiringRP
- C
- Python
WiringRP 库中提供了一系列的 API 函数,用更少的逻辑实现控制。
使用前需按下面方法安装 WiringRP:
- 将魔方派公共个人软件档案(PPA)添加到您的魔方派 3 Ubuntu 软件源。
REPO_ENTRY="deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main"
if ! grep -q "^[^#]*$REPO_ENTRY" /etc/apt/sources.list; then
sudo sed -i '$a deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main' /etc/apt/sources.list
fi
sudo apt update
- 执行下面命令安装 WiringRP.
sudo apt install wiringrp
以下代码示例,代码使用 SPI 总线进行数据收发通信:
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <stdlib.h>
int main(void)
{
int fd;
unsigned char send_data[64] = "hello world!";
unsigned char read_data[64];
if(wiringPiSetup() == -1)
exit(1);
fd = wiringPiSPISetup(0, 1000000);
if(fd < 0)
exit(2);
printf("\rtx_buffer: \n %s\n ", send_data);
// Send and receive data
if(wiringPiSPIDataRW(0, send_data, sizeof(send_data)) < 0)
exit(3);
printf("\rtx_buffer: \n %s\n ", send_data);
return 0;
}
编译程序
在魔方派 3 中编译
gcc spi.c -o spi -lwiringPi
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
将 19 号引脚和 21 号引脚使用杜邦线短接,验证 SPI 总线通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。

运行如下命令:
./spi
程序执行结果如下:

以下代码示例,代码使用 SPI 总线进行数据收发通信:
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <fcntl.h>
#include <unistd.h>
#include <linux/spi/spidev.h>
#include <sys/ioctl.h>
#define SPI_DEVICE_PATH "/dev/spidev12.0"
int main() {
int spi_file;
uint8_t tx_buffer[50] = "hello world!";
uint8_t rx_buffer[50];
// Open the SPI device
if ((spi_file = open(SPI_DEVICE_PATH, O_RDWR)) < 0) {
perror("Failed to open SPI device");
return -1;
}
// Configure SPI mode and bits per word
uint8_t mode = SPI_MODE_0;
uint8_t bits = 8;
if (ioctl(spi_file, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
close(spi_file);
return -1;
}
if (ioctl(spi_file, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("Failed to set SPI bits per word");
close(spi_file);
return -1;
}
// Perform SPI transfer
struct spi_ioc_transfer transfer = {
.tx_buf = (unsigned long)tx_buffer,
.rx_buf = (unsigned long)rx_buffer,
.len = sizeof(tx_buffer),
.delay_usecs = 0,
.speed_hz = 1000000, // SPI speed in Hz
.bits_per_word = 8,
};
if (ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer) < 0) {
perror("Failed to perform SPI transfer");
close(spi_file);
return -1;
}
/* Print tx_buffer and rx_buffer*/
printf("\rtx_buffer: \n %s\n ", tx_buffer);
printf("\rrx_buffer: \n %s\n ", rx_buffer);
// Close the SPI device
close(spi_file);
return 0;
}
在魔方派 3 中编译
gcc spi.c -o spi
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
将 19 号引脚和 21 号引脚使用杜邦线短接,验证 SPI 总线通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
./spi
程序执行结果如下:
可使用 Python 的 spidev 库进行 SPI 通信,spidev 库可在魔方派 3 中使用下面命令进行安装:
apt install python3-spidev
以下代码示例,代码使用 SPI 总线进行数据收发通信:
import spidev
def main():
tx_buffer = [ord(char) for char in "hello world!"]
rx_buffer = [0] * len(tx_buffer)
try:
spi = spidev.SpiDev()
spi.open(12, 0)
spi.max_speed_hz = 1000000
rx_buffer = spi.xfer2(tx_buffer[:])
print("tx_buffer:\n\r", ''.join(map(chr, tx_buffer)))
print("rx_buffer:\n\r", ''.join(map(chr, rx_buffer)))
except Exception as e:
print(f"An error occurred: {e}")
finally:
if spi:
spi.close()
if __name__ == "__main__":
main()
将 19 号引脚和 21 号引脚使用杜邦线短接,验证 SPI 总线通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。

在魔方派 3 中运行如下命令:
python3 spi.py
程序执行结果如下:

UART
魔方派 3 适配了 WiringRP(基于高性能 GPIO 编程库 WiringPi),推荐使用 WiringRP 来控制 UART,和对 UART 编程。关于 WiringRP 详细信息可访问 https://github.com/rubikpi-ai/WiringRP 查看。
引脚分布
下图是魔方派 3 40-pin 连接器的引脚默认功能,其中大部分引脚和开源开发板 40-pin 连接器引脚的默认功能兼容。
8 号和 10 号引脚默认已设置配为 UART,设备节点为 /dev/ttyHS2。
下表是 40-pin 连接器支持的所有功能,图中蓝色字体表明默认功能。

使用 UART
- Shell 命令
- WiringRP
- C
- Python
在魔方派 3 中 使用下面命令控制串口通信
使用 stty 工具配置串口,如下将串口的输入速率和输出速率都设置为 115200,并关闭回显:
stty -F /dev/ttyHS2 ispeed 115200 ospeed 115200
stty -F /dev/ttyHS2 -echo
在魔方派 3 上开启两个终端,将 8 号引脚和 10 号引脚使用杜邦线短接,分别执行下面命令,接收端会回显发送端的内容:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
echo "hello world!" > /dev/ttyHS2 # 发送端
cat /dev/ttyHS2 # 接收端
WiringRP 库中提供了一系列的 API 函数,用更少的逻辑实现控制。
使用前需按下面方法安装 WiringRP:
- 将魔方派公共个人软件档案(PPA)添加到您的魔方派 3 Ubuntu 软件源。
REPO_ENTRY="deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main"
if ! grep -q "^[^#]*$REPO_ENTRY" /etc/apt/sources.list; then
sudo sed -i '$a deb http://apt.thundercomm.com/rubik-pi-3/noble ppa main' /etc/apt/sources.list
fi
sudo apt update
- 执行下面命令安装 WiringRP.
sudo apt install wiringrp
以下代码示例,使用UART进行数据收发通信:
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <wiringPi.h>
#include <wiringSerial.h>
int main ()
{
int fd ;
int count ;
unsigned int nextTime ;
if ((fd = serialOpen ("/dev/ttyHS2", 115200)) < 0)
{
fprintf (stderr, "Unable to open serial device: %s\n", strerror (errno)) ;
return 1 ;
}
if (wiringPiSetup () == -1)
{
fprintf (stdout, "Unable to start wiringPi: %s\n", strerror (errno)) ;
return 1 ;
}
char tx_buffer[] = "hello world!\n";
for (count = 0 ; count < sizeof(tx_buffer) ; count++)
{
serialPutchar (fd, tx_buffer[count]) ;
delay (3) ;
printf ("%c", serialGetchar (fd)) ;
}
printf ("\n") ;
return 0 ;
}
在魔方派 3 中编译程序
gcc uart.c -o uart -lwiringPi
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
将 8 号引脚和 10 号引脚使用杜邦线短接,验证串口通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
./uart
程序执行结果如下:

以下代码示例,使用 UART 进行数据收发通信:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
int main() {
int serial_port_num = 2;
char serial_port[15];
sprintf(serial_port,"/dev/ttyHS%d",serial_port_num);
int serial_fd;
serial_fd = open(serial_port, O_RDWR | O_NOCTTY);
if (serial_fd == -1) {
perror("Failed to open serial port");
return 1;
}
struct termios tty;
memset(&tty, 0, sizeof(tty));
if (tcgetattr(serial_fd, &tty) != 0) {
perror("Error from tcgetattr");
return 1;
}
cfsetospeed(&tty, B9600);
cfsetispeed(&tty, B9600);
tty.c_cflag &= ~PARENB;
tty.c_cflag &= ~CSTOPB;
tty.c_cflag &= ~CSIZE;
tty.c_cflag |= CS8;
if (tcsetattr(serial_fd, TCSANOW, &tty) != 0) {
perror("Error from tcsetattr");
return 1;
}
char tx_buffer[] = "hello world!\n";
ssize_t bytes_written = write(serial_fd, tx_buffer, sizeof(tx_buffer));
if (bytes_written < 0) {
perror("Error writing to serial port");
close(serial_fd);
return 1;
}
printf("\rtx_buffer: \n %s ", tx_buffer);
char rx_buffer[256];
int bytes_read = read(serial_fd, rx_buffer, sizeof(rx_buffer));
if (bytes_read > 0) {
rx_buffer[bytes_read] = '\0';
printf("\rrx_buffer: \n %s ", rx_buffer);
} else {
printf("No data received.\n");
}
close(serial_fd);
return 0;
}
在魔方派 3 中编译程序
gcc uart.c -o uart
若无 gcc 命令,可执行 apt install gcc 命令进行安装。
将 8 号引脚和 10 号引脚使用杜邦线短接,验证串口通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。
运行如下命令:
./uart
程序执行结果如下�:

可使用 Python 的 serial 库进行 UART 通信,可在魔方派 3 中使用下面命令进行安装:
apt install python3-serial
以下代码示例,使用 UART 进行数据收发通信:
import serial
import time
with serial.Serial(
"/dev/ttyHS2",
baudrate=115200,
bytesize=serial.EIGHTBITS,
stopbits=serial.STOPBITS_ONE,
parity=serial.PARITY_NONE,
timeout=1,
) as uart3:
uart3.write(b"Hello World!\n")
buf = uart3.read(128)
print("Raw data:\n", buf)
data_strings = buf.decode("utf-8")
print("Read {:d} bytes, printed as string:\n {:s}".format(len(buf), data_strings))
将 uart.py 传输到魔方派 3 中,如果使用 ADB 传输,命令如下:
adb push uart.py /opt
将 8 号引脚和 10 号引脚使用杜邦线短接,验证串口通信,如下图所示:
注意引脚顺序,请勿将电源和地引脚短接,否则可能会造成板子损坏。

运行如下命令:
python3 uart.py
程序执行结果如下:
