机器人示例应用程序
基于 Ubuntu 的 Qualcomm® 智能机器人 (QIR) SDK,为您在 Qualcomm 平台上开发机器人应用提供了所需的核心组件。
QIR SDK 的主要功包括:
• 参考 ROS 软件包:提供机器人操作系统 (ROS) 软件包,支持机器人应用程序开发。
• 端到端场景示例:包含示例场景来帮助评估机器人平台。
• QRB ROS 传输:在高通机器人平台上实现 ROS 消息的零拷贝传输。
备注
QRB ROS Transport 基于 REP 2007实现,该标准定义了序列化自定义类型的接口,支持无需转换的进程内通信。
前提条件
- Ubuntu 操作系统 已刷入。
- 具有适当权限的终端访问。
- 如果您之前没有安装过 PPA 包,请按照以下步骤进行安装。
git clone -b ubuntu_setup --single-branch https://github.com/rubikpi-ai/rubikpi-script.git
cd rubikpi-script
./install_ppa_pkgs.sh
在 Ubuntu 上开始使用 QIR SDK
本指南将指导您在运行 Ubuntu 的开发套件上使用 QIR 示例应用程序。
设置说明:
- 使用脚本获取 ROS2 和 QIR SDK。
- 安装 QIR SDK。
- 根据 ROS2 documentation 将 ROS 源添加到设备。
- 将 Qualcomm 公共 PPA 档案添加到您的 Ubuntu 软件源:
sudo add-apt-repository ppa:ubuntu-qcom-iot/qcom-ppa
sudo add-apt-repository ppa:ubuntu-qcom-iot/qirp
- 安装并配置 QIR SDK:
sudo apt install qirp-sdk
source /usr/share/qirp-setup.sh
示例应用程序
QIR SDK 包含各种示例应用程序,分类如下:
• 平台示例应用程序:展示平台级能力。
• 机器人示例应用程序:实现机器人功能,例如 CPU 负载监控和基于 ROS2 的机器人仿真。
仿真示例 – 自主移动机器人简单运动
自主移动机器人(AMR)简单运动是一个模拟示例应用程序,它使用基于 Python 的 ROS 节点来控制 QRB 自主移动机器人 (AMR) 在仿真环境的的运动。
qrb-ros-simulation 软件包提供了一个仿真环境。您可以通过向 /qrb_robot_base/cmd_vel 主题发布ROS消息来控制QRB AMR的运动。
QRB AMR简单运动的管道流
下图展示了QRB AMR 简单运动的的管道流程:
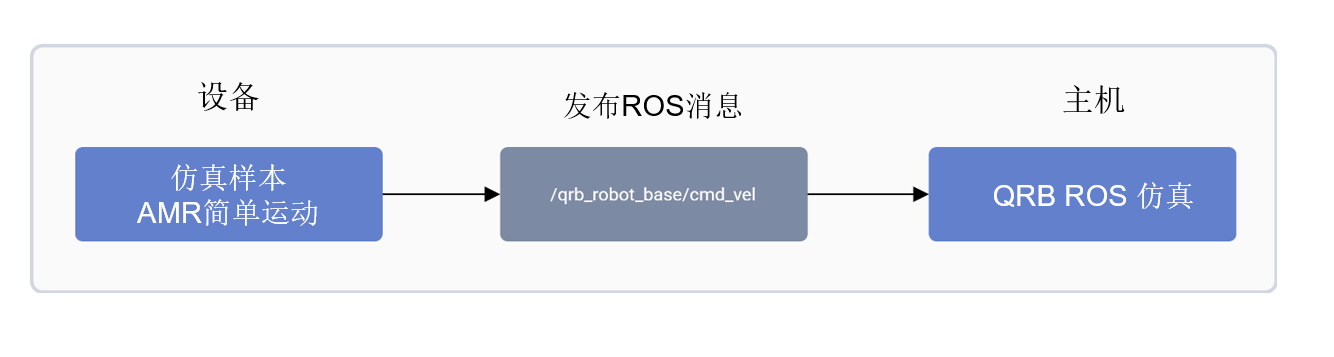
AMR简单运动管道中使用的ROS节点
AMR简单运动管道中使用的ROS节点如下:
| ROS 节点 | 描述 |
|---|---|
| Qrb_ros-simulation | qrb_ros_simulation 是一个专用于搭建高通机器人仿真环境的ROS功能包。 |
参考文档
有关运行示例应用程序的详细说明,请参阅 Qualcomm Intelligent Robotics SDK for Ubuntu。