YOLO-Pro 智能停车计时器 - 魔方派 3
作者:Jallson Suryo
项目链接:https://studio.edgeimpulse.com/public/624749/live
演示视频:https://youtu.be/x9OswYAFIKg
GitHub 仓库:https://github.com/Jallson/YOLO_based_Parking_Meter
如需树莓派版本,请参考:https://docs.edgeimpulse.com/projects/expert-network/smart-parking-meter-raspberry-pi
问题描述
传统的路边停车管理依赖静态标识、限时计费和人工巡查,效率低且容易出现违规和管理漏洞,尤其在限时或付费区域更为突出,影响城市管理和收入。智慧城市背景下,亟需自动化、智能化系统实时监控停车行为。
 停车区域
停车区域
解决方案
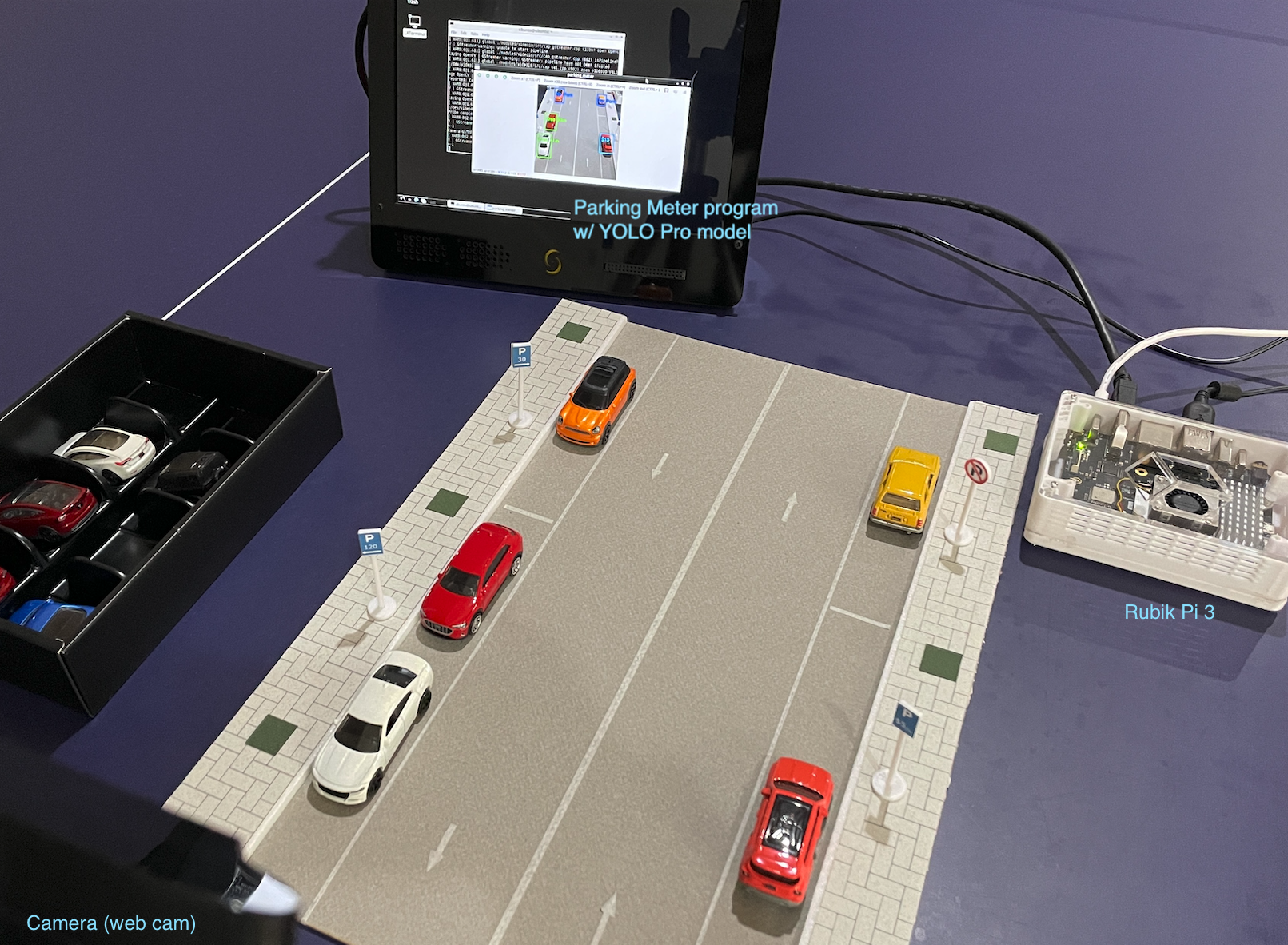
为应对上述挑战,并作为视觉边缘 AI 部署学习的一部分,我们开发了这个采用 Edge Impulse YOLO Pro 目标检测的项目。模型在 Edge Impulse Studio 训练优化后,部署在 Thundercomm 魔方派 3 上进行实时推理。基于迁移学习和 YOLO Pro 预训练权重,训练数据量大幅减少,同时保持用例高准确率。系统与 Python 跟踪逻辑无缝集成,实现分区停车规则(如禁停区、付费时长、违规阈值)视觉反馈和时序跟踪。最终形成低成本、节能、可扩展的当代城市停车管理解决方案 — 智能停车计时器。
 视觉停车系统
视觉停车系统
硬件清单
- 魔方派 3
- USB-C 电源适配器(如 27W Pi 5 电源)
- 树莓派 5 主动散热器(可选)
- 3D 打印外壳(可选)
- PC/笔记本(用于 SSH 和 EDL 模式刷机)
- 键盘、鼠标
- USB-C/A 转 USB-C
- USB-C/A 转 micro-USB
- USB 摄像头/网络摄像头(如 Logitech C920/C922)
- HDMI 显示器
- 迷你三脚架
- 带停车场景的小车模型
 硬件
硬件
软件与在线服务
- Edge Impulse Studio
- Edge Impulse Linux & Python SDK
- Ubuntu OS (24.04)
- OpenCV
步骤
1. 准备魔方派 3
魔方派 3 出厂预装 Qualcomm Linux(基于 Yocto)或精简版 Ubuntu。如果是 QC Linux,需刷成 Ubuntu OS,因为 QC Linux 不支持 apt和dpkg包管理器,对 OpenCV、GStreamer 的支持有限,且运行环境受限。
准备 USB-C 和 micro-USB 线,下载 Qualcomm Launcher,按刷机教程 刷写并切换到 Ubuntu OS。
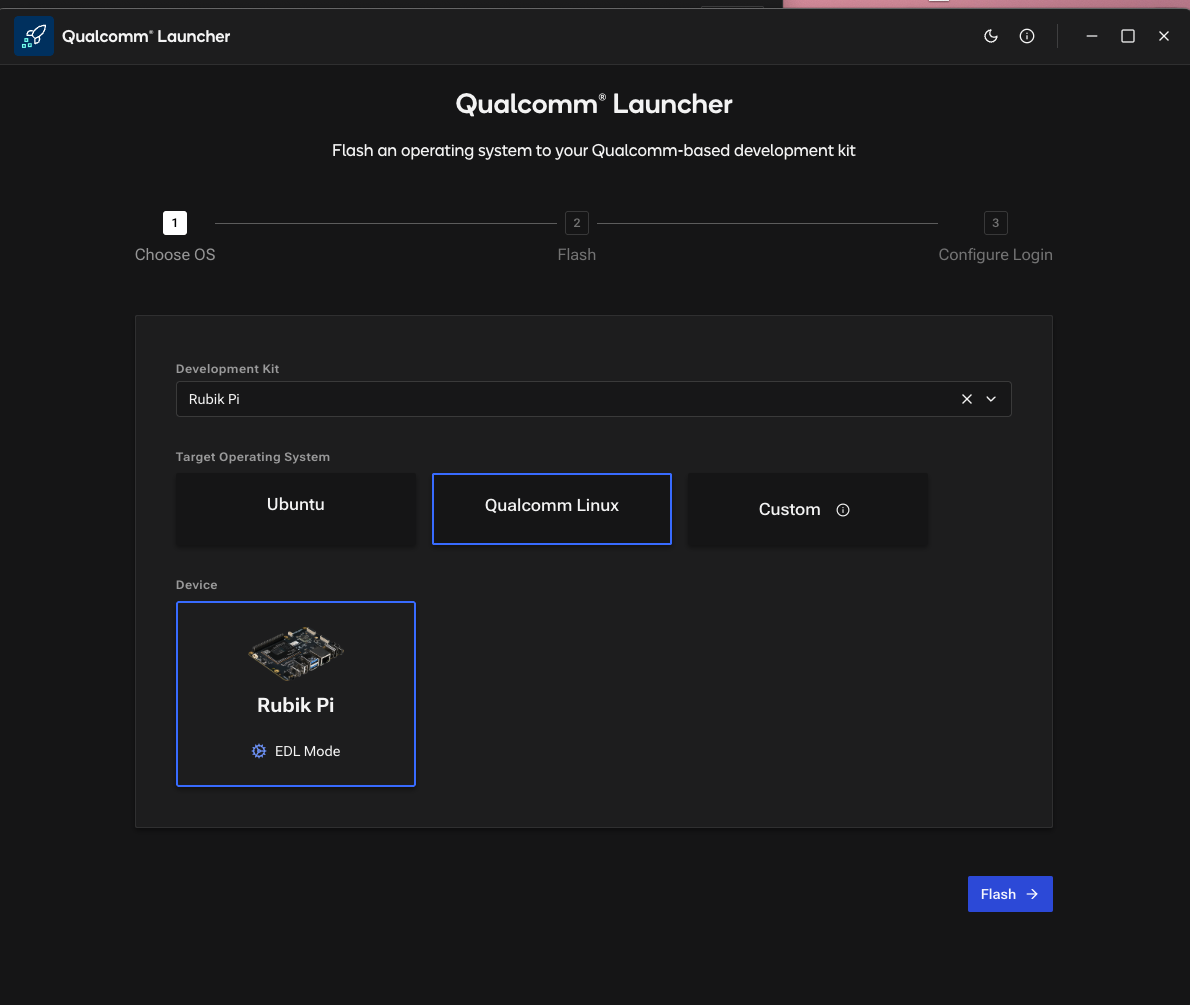 Qualcomm Launcher
Qualcomm Launcher
 EDL 模式
EDL 模式
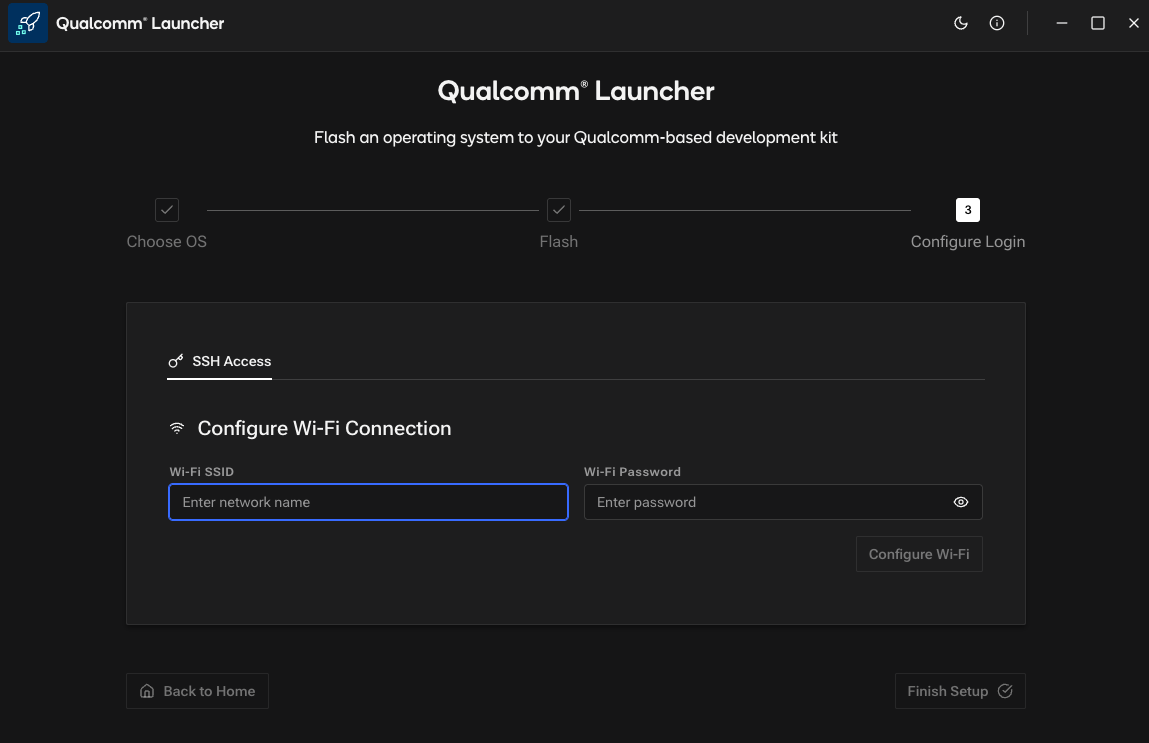 Wi-Fi 配置
Wi-Fi 配置
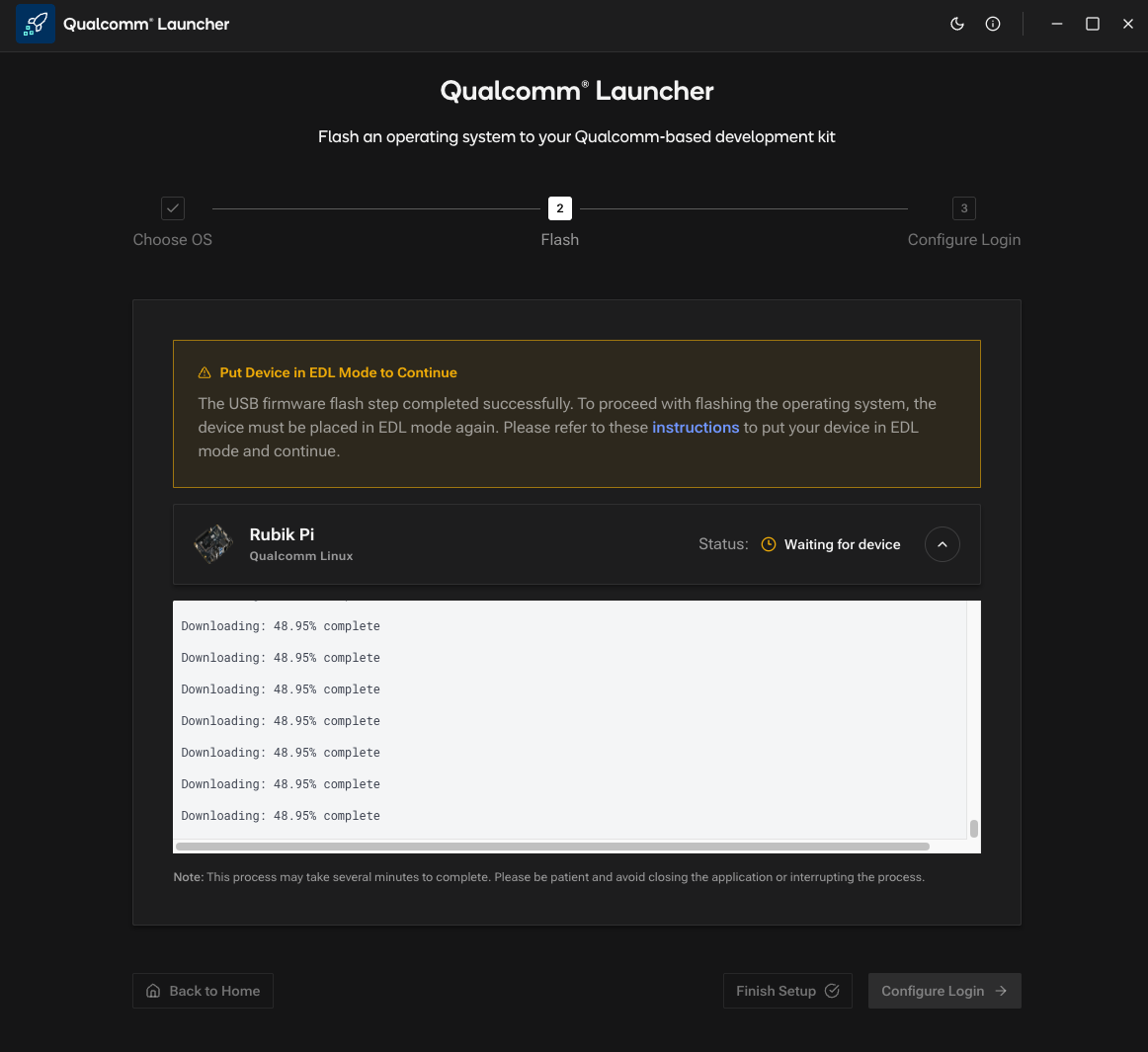
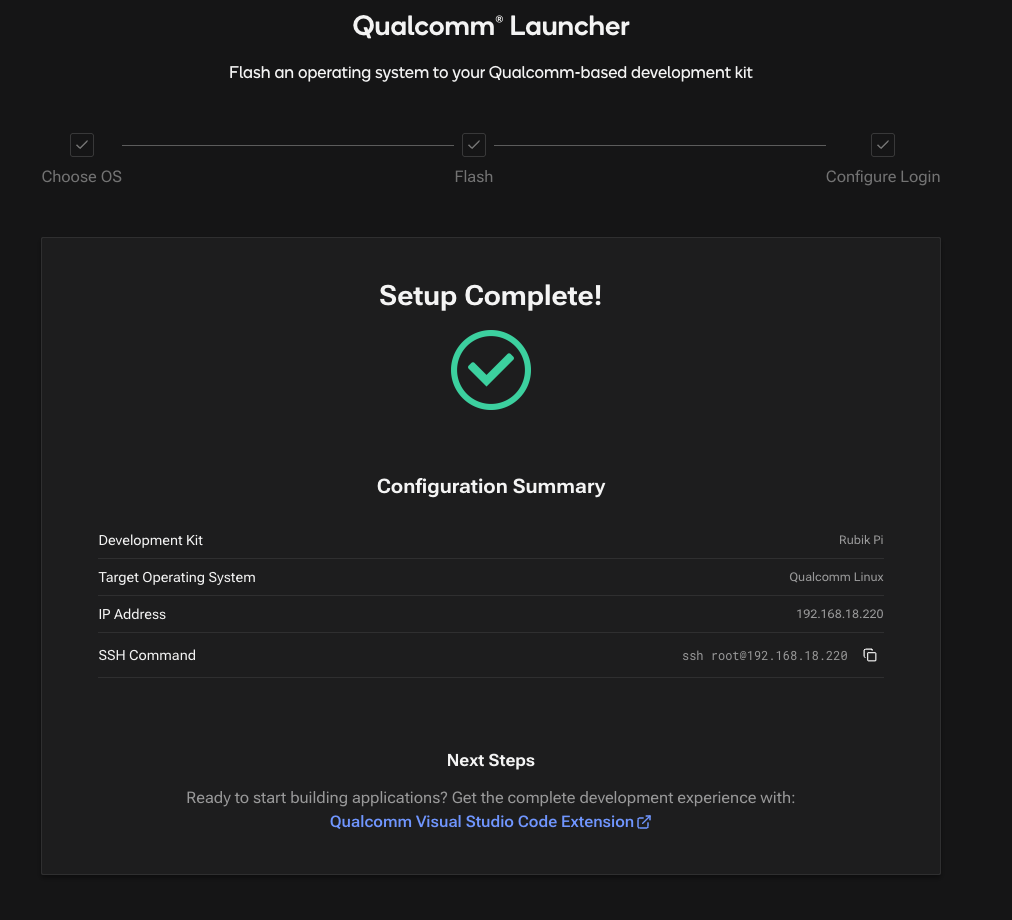 刷机完成
刷机完成
刷机成功后,联网、重启并登录(用户名/密码均为 ubuntu),打开终端/SSH,安装 Edge Impulse CLI:
sudo apt update
curl -sL https://deb.nodesource.com/setup_20.x | sudo bash -
sudo apt install -y gcc g++ make build-essential nodejs sox gstreamer1.0-tools gstreamer1.0-plugins-good gstreamer1.0-plugins-base gstreamer1.0-plugins-base-apps
sudo npm install edge-impulse-linux -g —unsafe-perm
说明:Python SDK 及其他依赖请见第 5 步。
桌面/显示问题与排查 默认情况下,魔方派的 Ubuntu 烧录过程仅安装命令行(服务器)版本的 Ubuntu。如需添加 Desktop 环境,可以尝试以下解决方案:
方案 1:安装 LXDE/轻量桌面 运行以下命令:
sudo apt update
sudo apt install lxde
sudo reboot
方案 2:安装 Ubuntu 桌面版(推荐) 运行以下命令:
sudo apt install qcom-adreno1- libgbm-msm1- libegl-mesa0 libegl1 libgles2 libglvnd0 libvulkan1 weston-
sudo apt install ubuntu-desktop
sudo reboot
2. 采集数据
在 Edge Impulse Studio 中构建模型的初始阶段需要准备数据。您可以收集自己的数据,以更好地满足项目需求。可用手机/相机采集图片保存到文件夹。Edge Impulse Studio 新手可按如下步骤:
- 打开 studio.edgeimpulse.com,注册或登录,创建新项目。
- 选择图片项目,目标检测。
- 进入 Dashboard > Project Info, 选择 Bounding Boxes 标注方式,目标设备选 魔方派 3。
- 在数据采集页,点击 Upload Data,选择保存数据的文件夹并上传。
也可将 USB 摄像头接魔方派,通过 Edge Impulse Studio 采集图片。魔方派安装好 Edge Impulse Linux CLI 后,运行:
edge-impulse-linux --clean
运行该命令后会启动一个向导,提示你登录并选择项目,然后将魔方派与 USB 摄像头连接到 Studio 项目以采集照片。
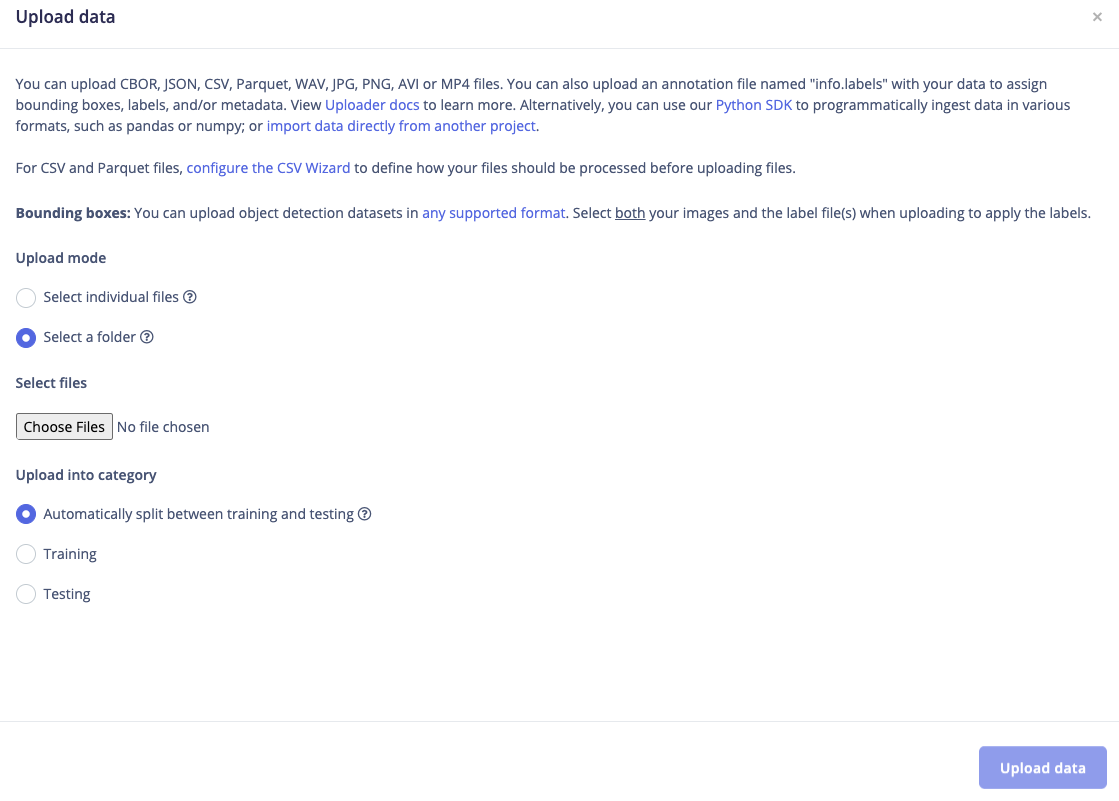 上传数据
上传数据
 从魔方派采集样本
从魔方派采集样本
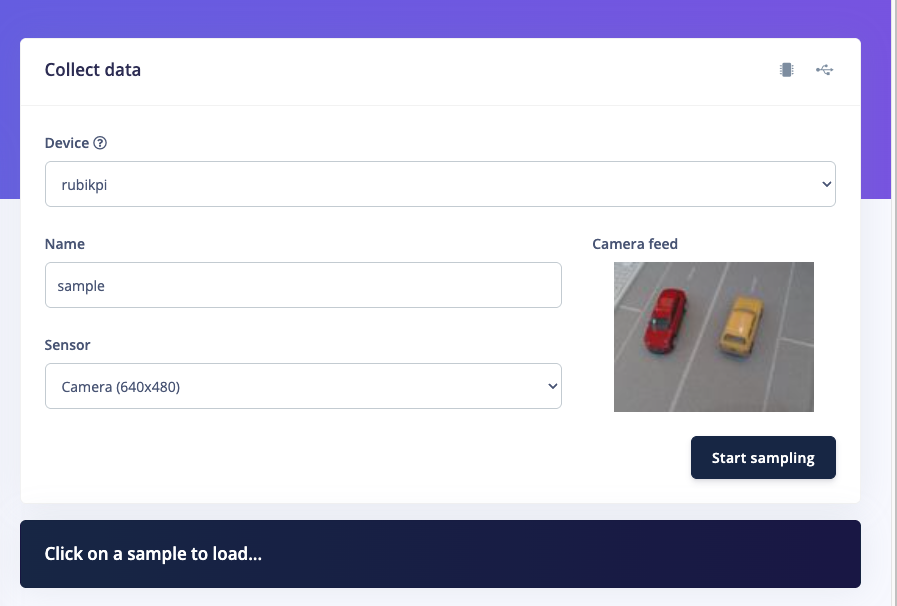 从连接的设备采样
从连接的设备采样
3. 标注
下一步是标注,点击 Data Acquisition,再点击 Labeling queue 页签,拖动方框圈选目标并标注,然后点击保存。重复此操作直到所有图片都被标注。也可以尝试 Edge Impulse 的新功能 AI 自动标注 来加快处理。
标注完成后,建议将数据按 8:2 比例分为训练集和测试集。如果还未分好,可以点击 Train / Test Split 自动完成。
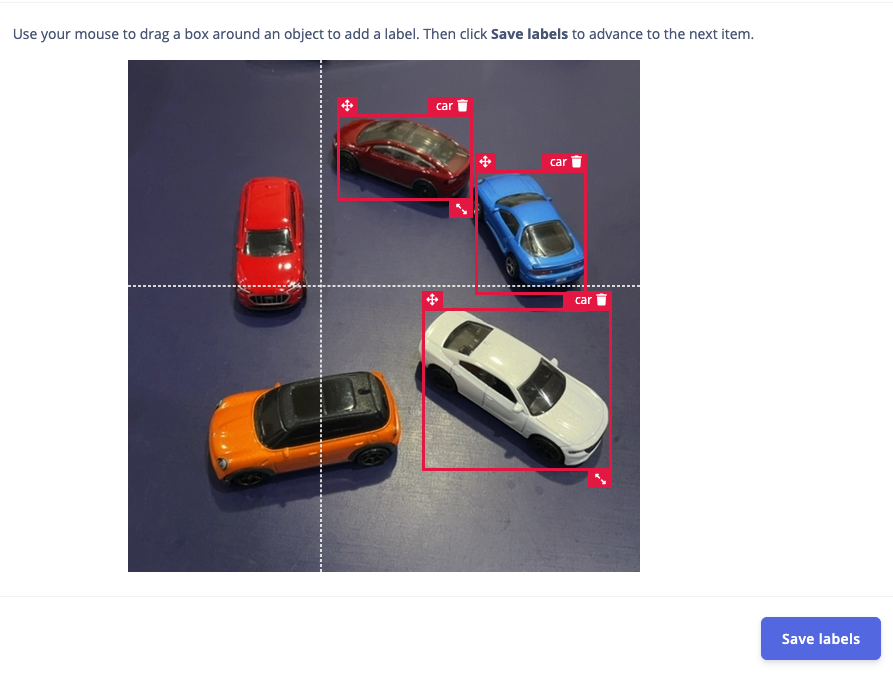 手动标注
手动标注
4. 训练并构建 YOLO-Pro 模型
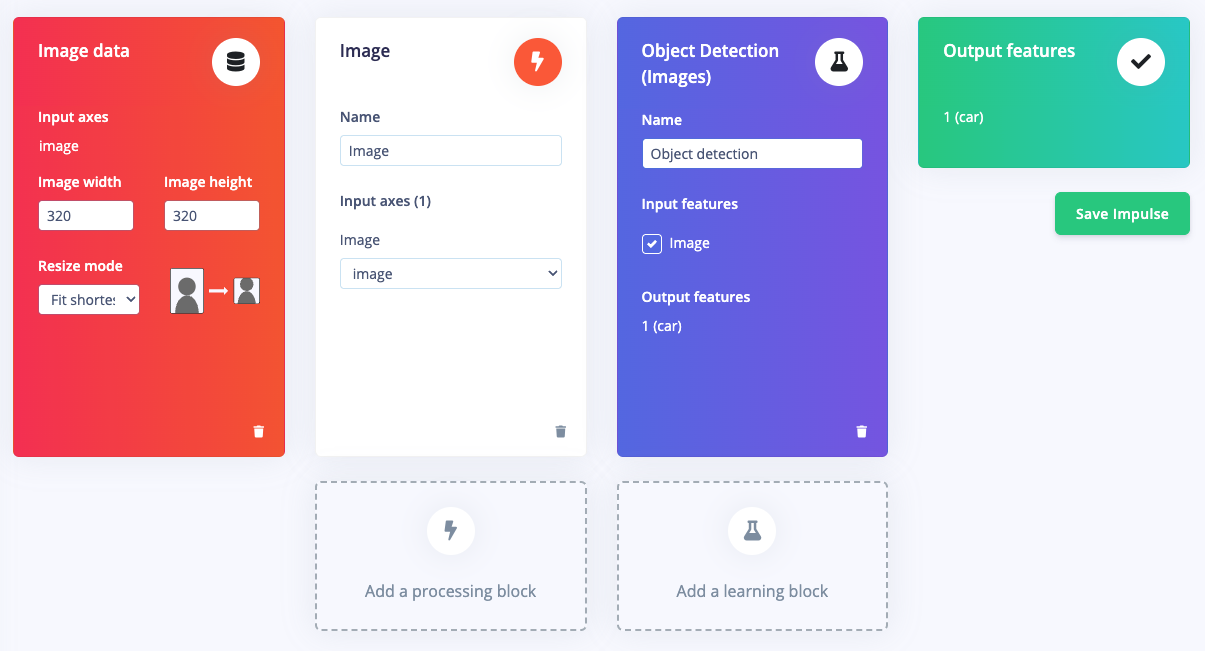
标注数据集准备好后,进入 Impulse Design > Create Impulse,设置图片宽高为 320x320,选择 Fit shortest axis,然后添加 Image 和 Object Detection 学习模块,点击保存。接着进入 Image Parameters,选择 RGB 作为色彩深度,保存参数。然后点击 Generate,可查看特征数据的分布图。
进入 Object Detection 配置训练参数,选择 GPU,训练轮数设为 200,学习率 0.001,模型大小选中等,神经网络架构选 YOLO-Pro。设置��完成后点击 Start 开始训练并观察进度。
如果训练精度达到 90% 左右,进入 Model Testing,点击 Classify all,结果也在 90% 左右即可进入最后部署阶段。
 学习模块
学习模块
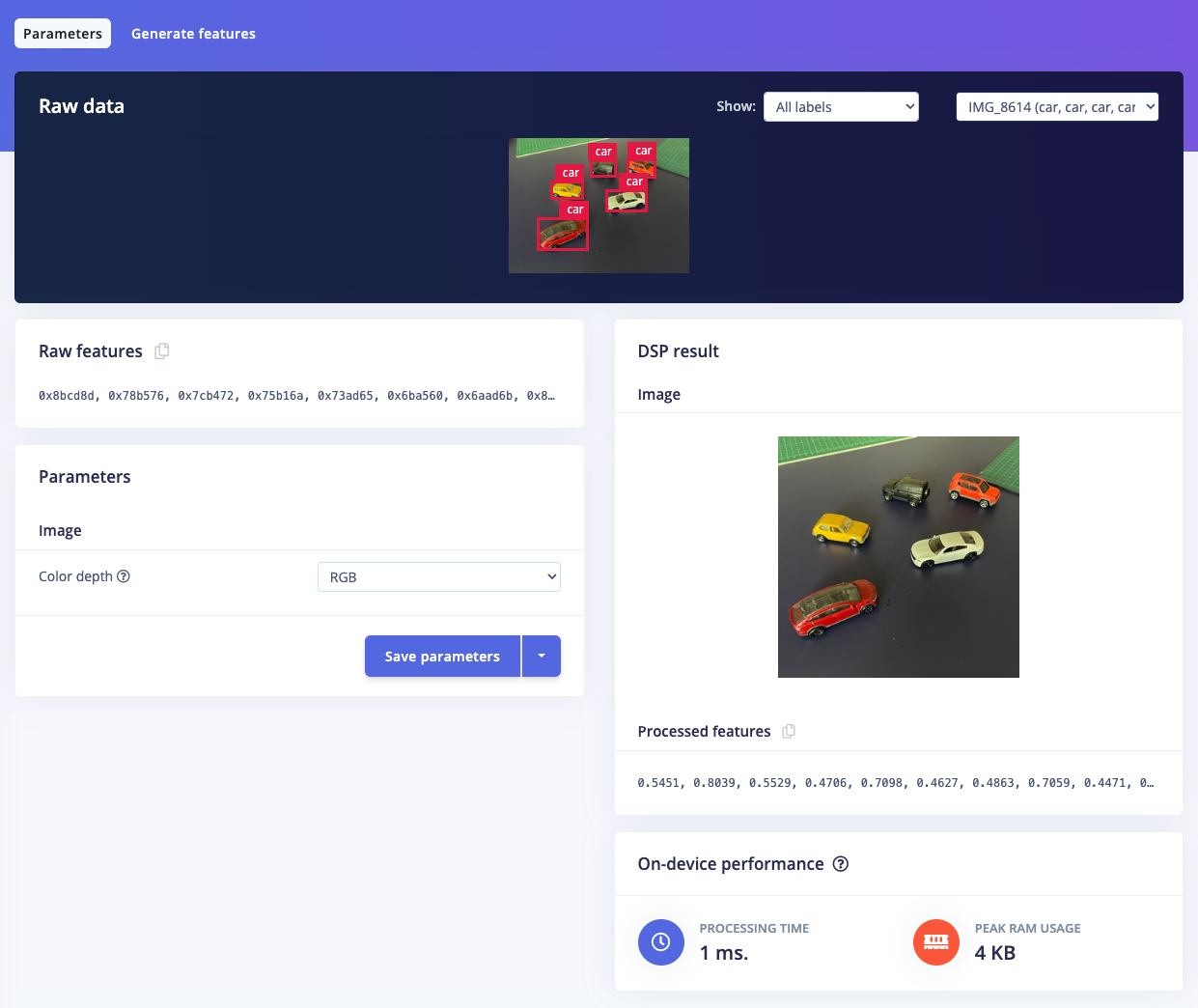 保存参数
保存参数
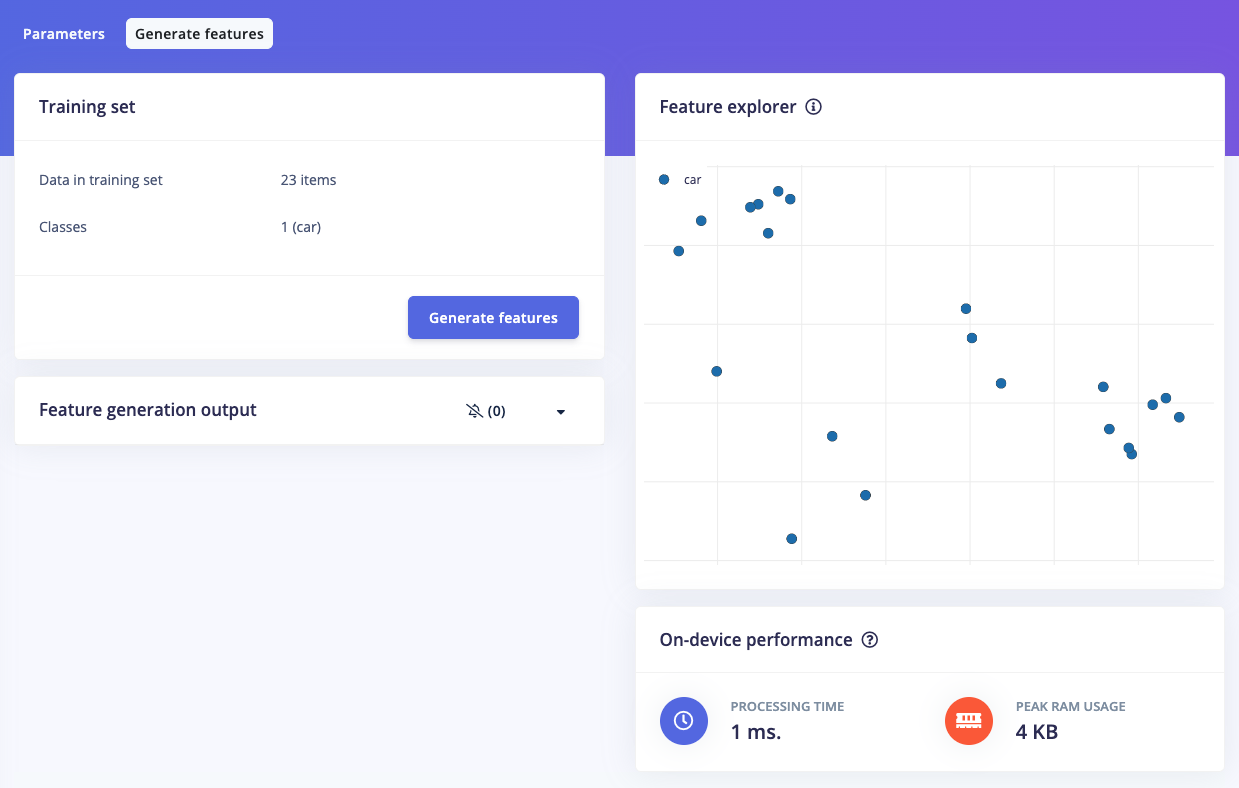 生成特征
生成特征
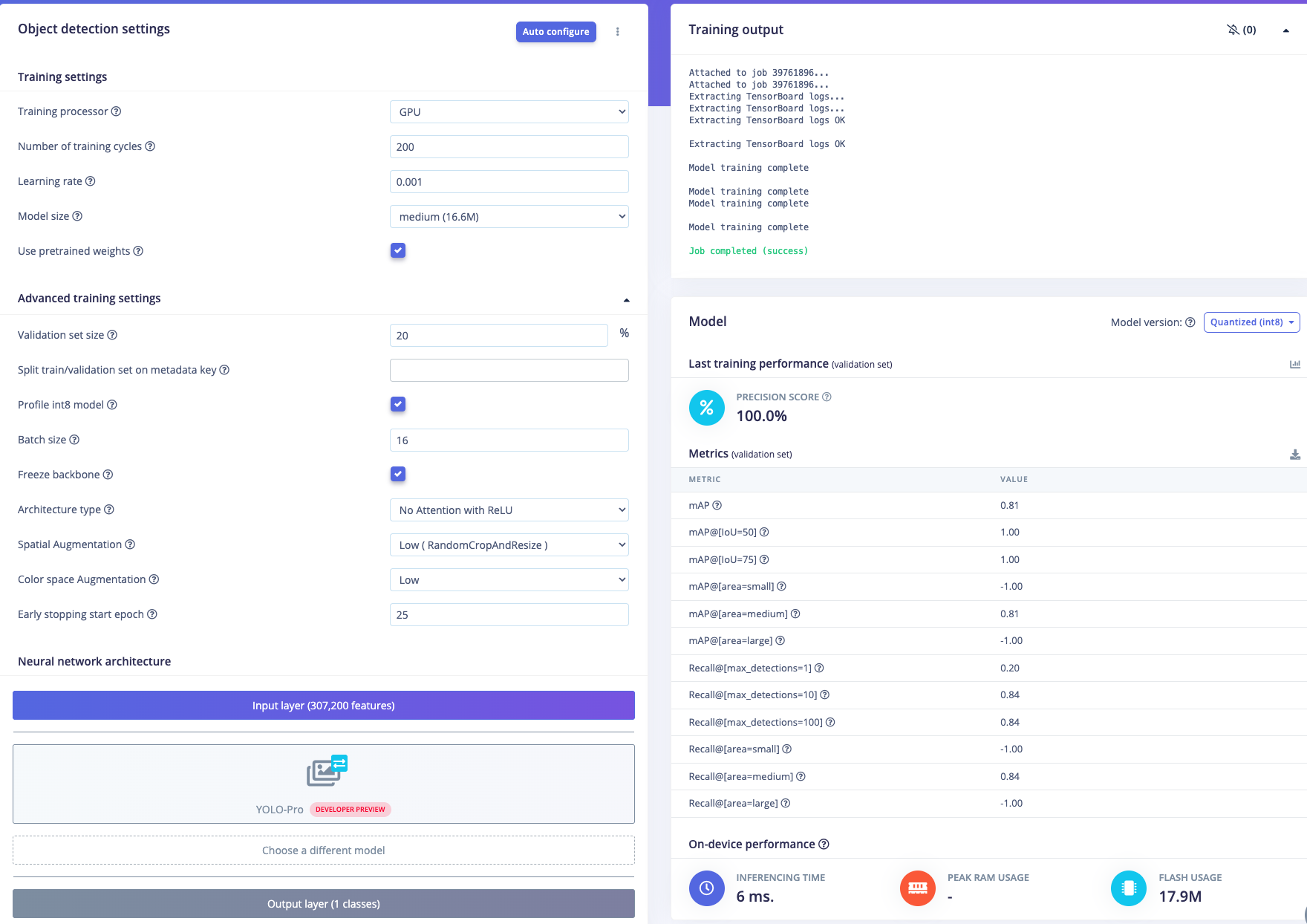 神经网络设置与结果
神经网络设置与结果
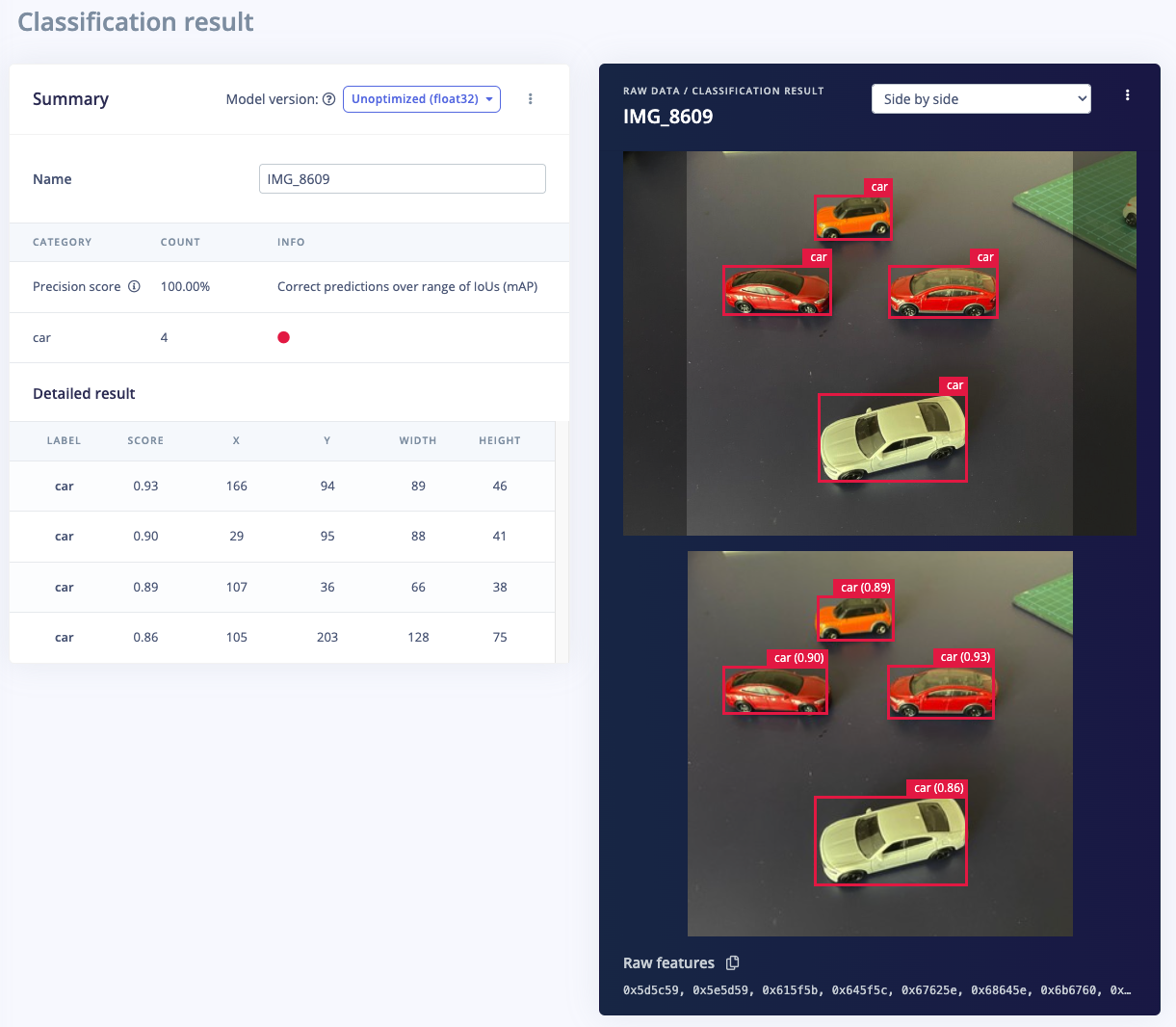 对比效果
对比效果
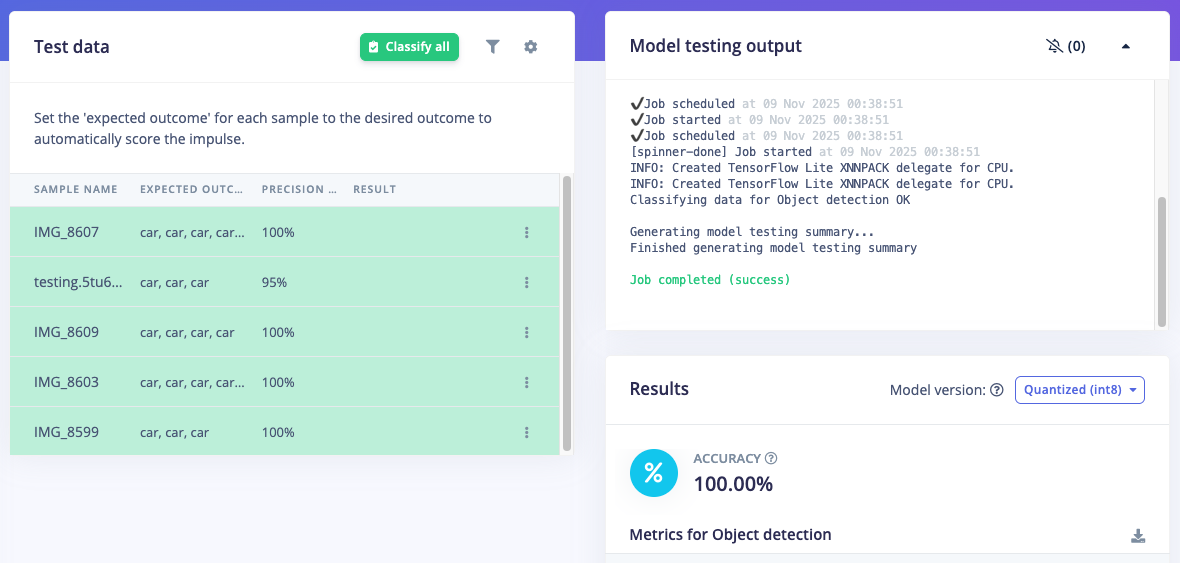 模型测试
模型测试
5. �在魔方派 3 上部署模型
只需确保模型已在 Edge Impulse Studio 构建完成。现在可以直接在魔方派(Ubuntu 24.04)上测试、下载和运行模型。
在魔方派上需做如下准备:安装较新版本的 Python 3(>=3.7),Ubuntu 24.04 默认自带 Python 3.12,可用 python3 --version 验证。
确保已安装最新版 Edge Impulse Linux CLI(见第 1 步)。然后安装 Linux Python SDK、OpenCV、ffmpeg、Gstreamer、numpy 等依赖:
sudo apt update && sudo apt upgrade -y
sudo apt install -y python3-pip python3-opencv ffmpeg gstreamer1.0-tools gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav libportaudio2
pip3 install numpy
pip3 install edge_impulse_linux
你可以克隆此仓库获取示例:git clone https://github.com/edgeimpulse/linux-sdk-python
然后安装其它依赖:pip install -r requirements.txt
接下来通过 Edge Impulse runner 构建/下载/运行模型。在魔方派终端或通过 PC/笔记本 ssh 连�接后,直接输入 edge-impulse-linux-runner(如曾用过其他项目可加 --clean 重新选择)。登录账号后选择项目,再选择具体 Impulse(如有),并确保选择 quantized model。此过程会下载专为 aarch64 QNN(高通 Hexagon 架构)构建的 model.eim 文件。控制台会显示下载路径。例如下图所示文件位于 /home/ubuntu/.ei-linux-runner/models/624749/v10-quantized…../model.eim。
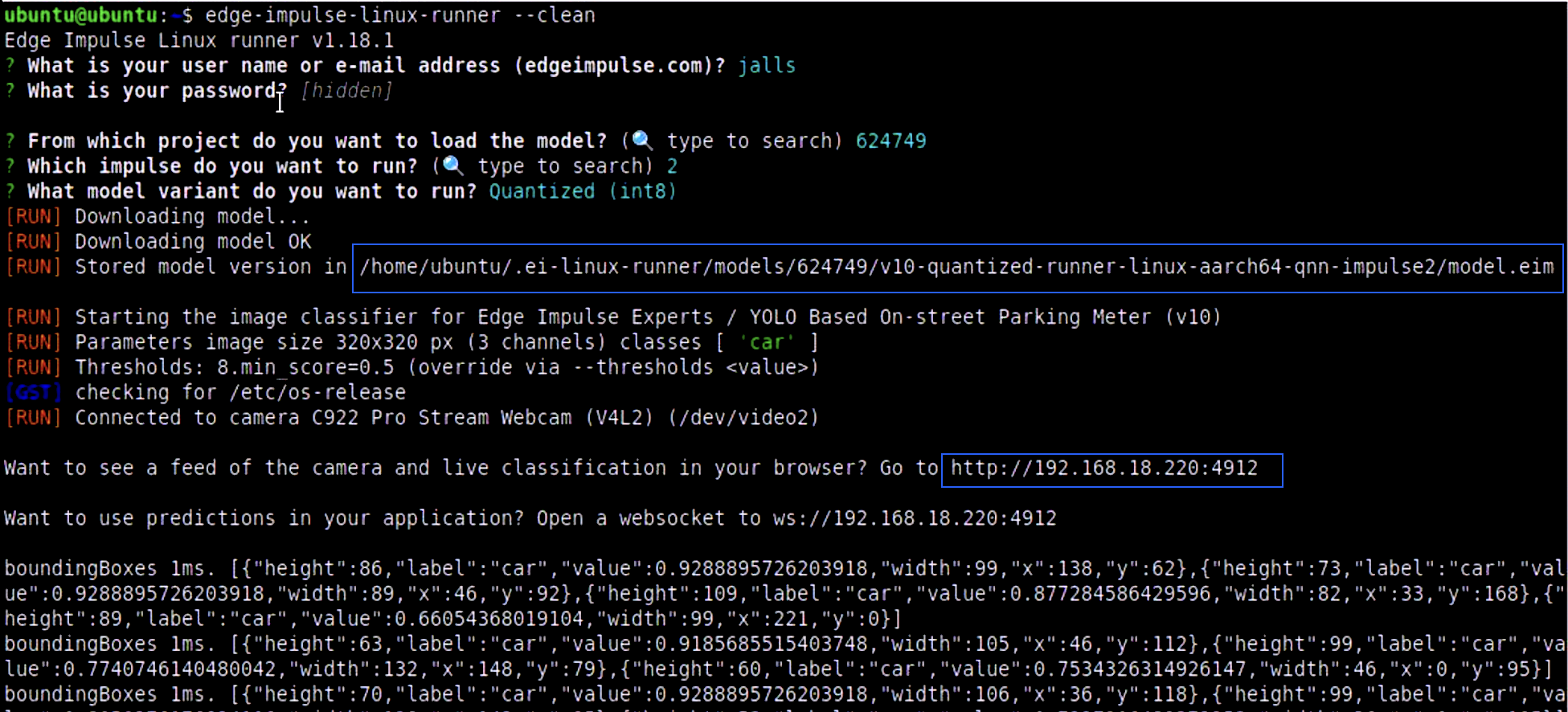 Edge Impulse Runner
Edge Impulse Runner
下载完成后可用 Ctrl+C 停止推理。
为方便访问,可用如下命令将其复制到 home 目录:cp -v model.eim /home/ubuntu
现在模型已准备就绪,可用 Python 等高级语言调用。为确保模型可用,可在连接摄像头的魔方派上重新运行 EI Runner。在浏览器访问魔方派本地 IP 的 4912 端口,查看摄像头画面与推理结果。再次运行:edge-impulse-linux-runner
 实时推理
实时推理
魔方派 3 上推理时间约 1-3ms,对于目标检测而言速度非常快(树莓派 3 约 40ms)。
6. 构建智能停车应用(Python)
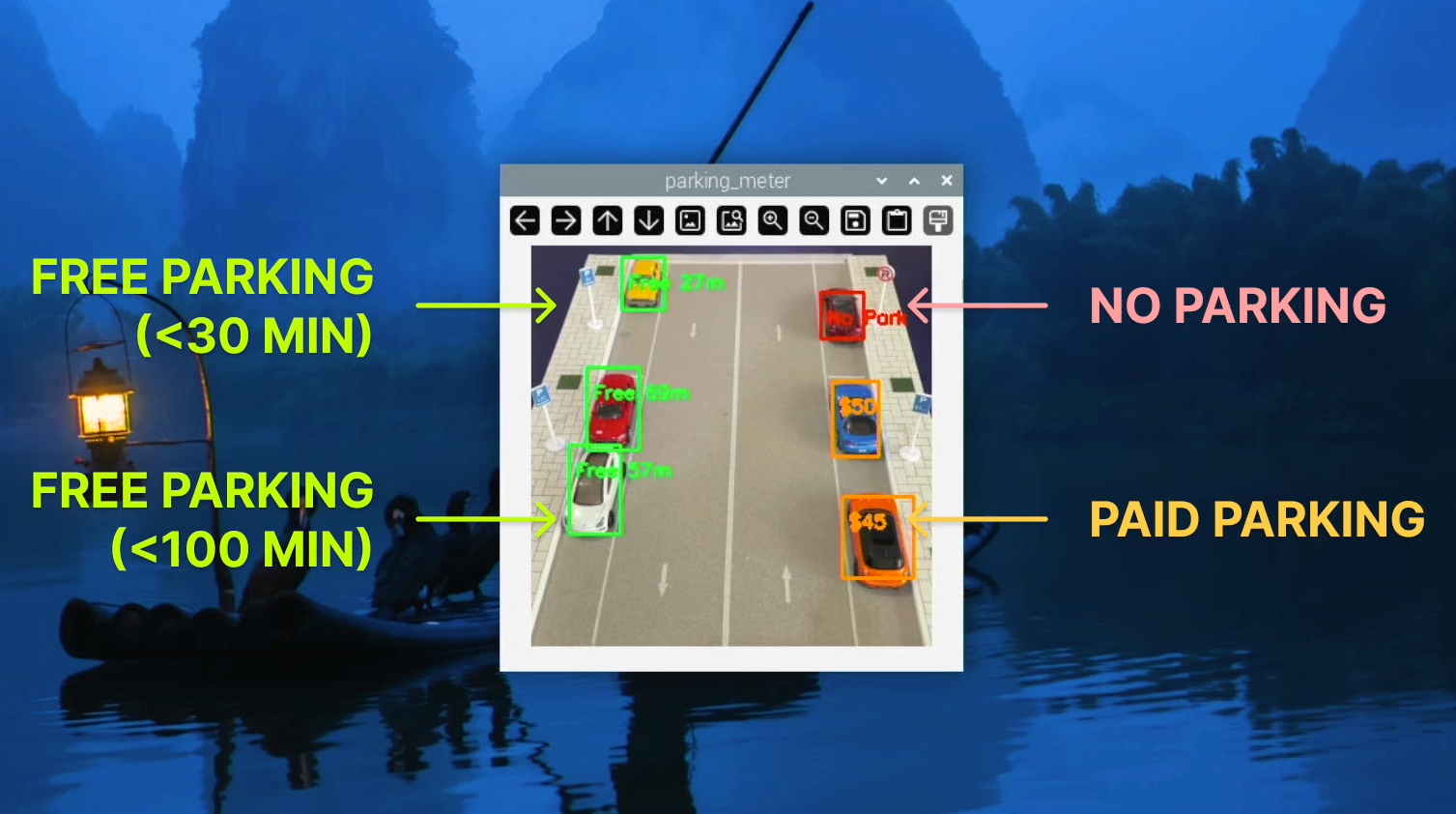
借助 Edge Impulse Runner 的高精度实时推理,我们可以编写基于 Python 的停车计时程序。该代码利用 YOLO-Pro 模型检测到的边界框进行目标跟踪和停车时长分析。每一帧会识别车辆位置和尺寸,并通过交并比(IoU)、中心距离和尺寸相似度与已跟踪目标匹配。若匹配成功,判断车辆是否移动,未移动则累计“静止”时长,移动或 3 秒后重新出现则重置计时。只有车辆静止超过 5 秒才显示边界框,确保其确实停车。
每辆车还会根据位置分配到四个停车区(A、B、C、D)之一。A、B 区允许停车,超时(30 秒或 100 秒)边框变红;C 区为禁停区,5 秒后变红;D 区为付费区,显示金额,每 10 秒收取 5 美元。分区逻辑可灵活调整,视觉反馈通过彩色边框和叠加文本实现。
说明:分钟已转换为秒,无需按实际停车时长等待。
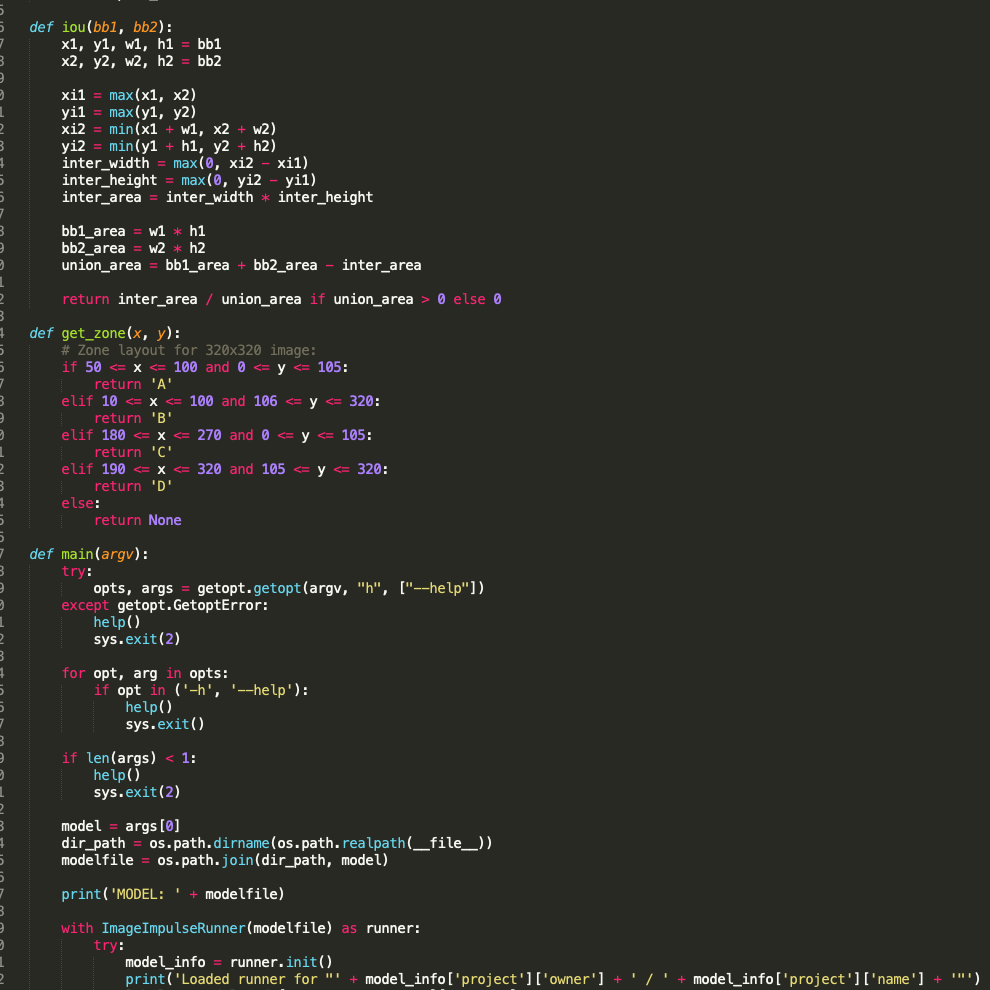 代码截图
代码截图
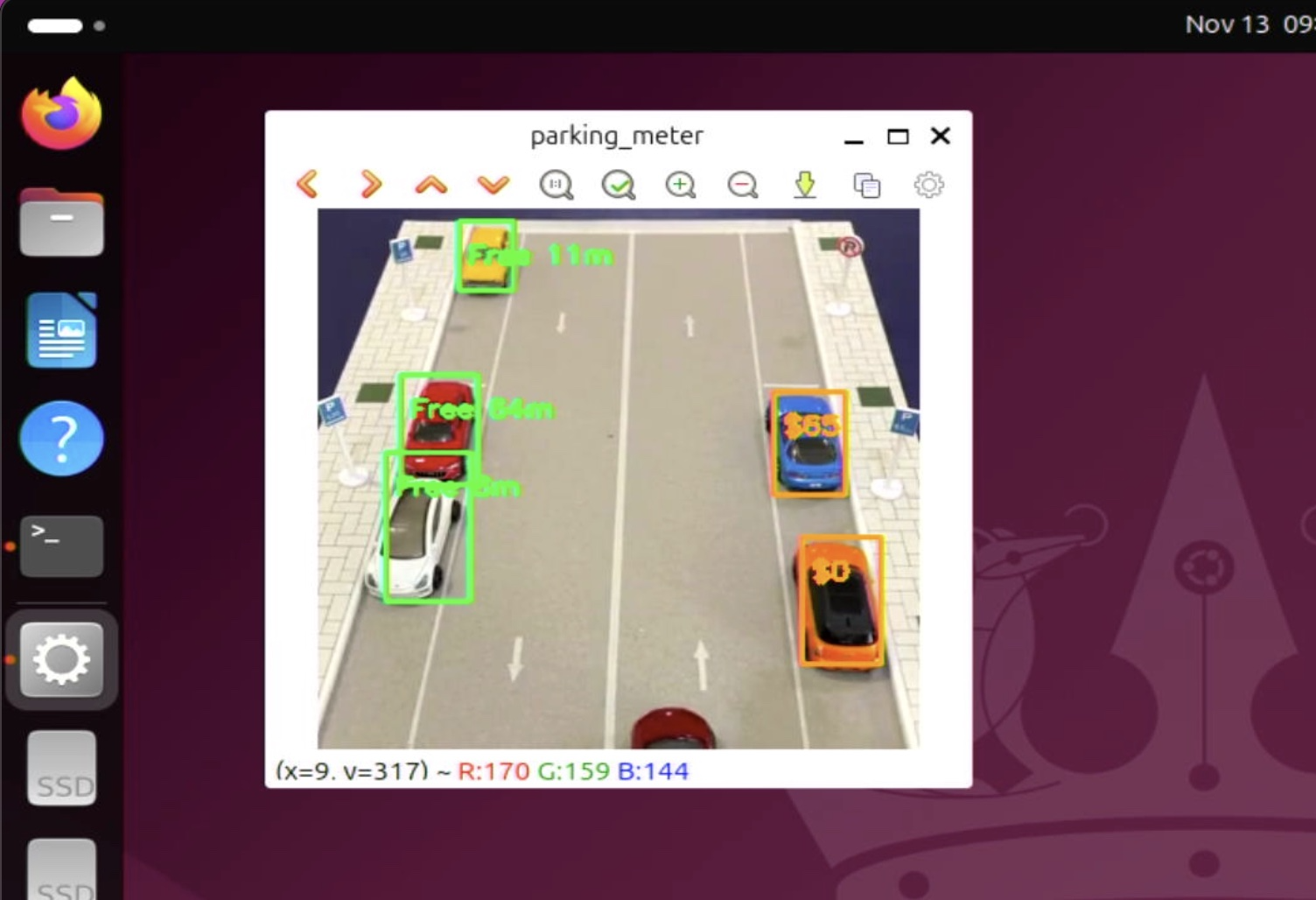 魔方派显示效果
魔方派显示效果
所有代码、图片和视频可在 https://github.com/Jallson/YOLO_based_Parking_Meter 获取。
连接 USB 摄像头后,运行程序(parkingmeter.py):
python3 parkingmeter.py <path to modelfile>/model.eim
演示视频: https://www.youtube.com/watch?v=x9OswYAFIKg
总结
我们已成功将 YOLO-Pro 机器学习模型集成到基于 Python 的视觉停车计时系统中。即便训练数据集很小,模型在本用例下依然表现出可靠精度。目标检测与跟踪的结合让系统能识别已停车车辆、监控时长,并在短暂消失或边框变化时保持跟踪。
系统支持多停车区,每区有独立规则,如禁停提醒、超时警告、动态计费等。这种灵活性让系统能适应真实场景且资源占用低。凭借实时性能、简单部署和低成本硬件,项目目标已圆满达成,且具备良好扩展性,适合智慧城市大规模部署。